完整論文:seam_carving.pdf · 程式碼:YuXiangLo/NTUPDP2026
與吳雅蓁、羅宇翔合作,台大平行程式設計,Spring 2026。
起點
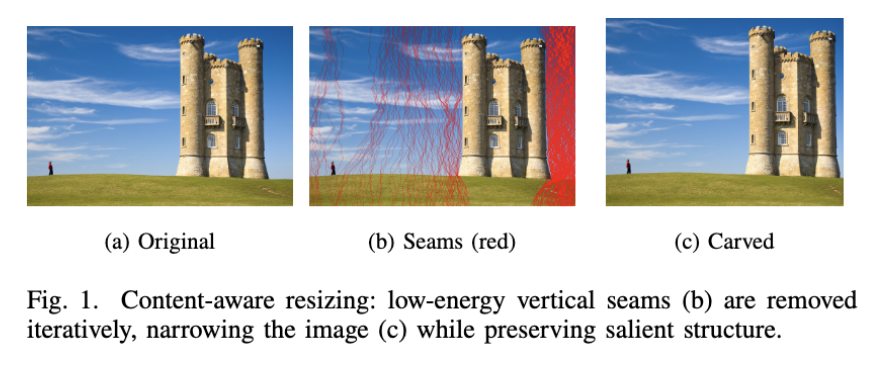
Seam carving 是一種 content-aware 的圖像縮放演算法。它不是裁切或縮放,而是移除圖片中「最不重要」的像素路徑——seam——同時保留視覺上重要的區域。效果出乎意料地好。
演算法主要有兩個沉重的步驟:先計算 energy map(梯度大小,對整張圖掃一遍);再執行動態規劃(DP)找出從上到下代價最小的連通路徑。移除那條 seam,重複。
在 CPU 上,這對大圖來說很慢。單核心處理一張 8K 圖(7680×4320,約 3300 萬像素)每條 seam 可能要幾百毫秒。我們有 V100。Energy 計算是完美的平行問題。問題看起來很明顯:能快多少?
我們原本預期找到一個新的優化方式,拿到一個漂亮的數字。最後我們證明了為什麼漂亮的數字在結構上不可能達到——而這才是更有趣的結果。
DP 的問題
用 Nsight Compute 對 1428×968 的圖做 profiling,問題立刻清楚了:DP kernel 佔每條 seam 牆上時間的 ~93%。其他全是雜訊。
DP 的遞推關係是:
| |
每一行依賴上一行。全部 H 行都是串行的。每行內部的 W 列可以平行——但在第 i-1 行完成之前無法開始第 i 行,沒有任何重新排序能消除這個依賴。這就是我們一直碰到的牆。
優化路徑
我們在每個步驟以 Nsight 為導引,建立了五個逐步改良的 kernel。
Naive 每行啟動一個 CUDA kernel。在 4K(H=2160)時,每條 seam 要啟動 2159 次 kernel,每次都有完整的 global memory 往返。小圖上 overhead 主導,大圖上 global memory 流量主導。
Fused 用 shared-memory ping-pong buffer 把所有 H 行折疊進單一 kernel。行之間只用一次 __syncthreads(),2159 次 kernel 啟動變成 1 次,cost array 在行與行之間不再碰 DRAM,住在 96 KB 的 shared memory 裡。這是正確的結構;問題是能跑多快。
Prefetch 來自閱讀 Nsight 輸出,不是直覺。Fused 的主要 stall 是 long_scoreboard——每個 warp 等 ~200 cycles 等 global load 讀 e[i][·]。修法是 software pipelining:在計算第 i 行(只讀 shared memory cost)的同時,每個 thread 把 e[i+1][·] 的 global load 提前發出存進 register。等 __syncthreads() 結束,load 已經 resolve 了。運算和記憶體傳輸重疊。這給出了最大的單步提升:kernel 層面比 Fused 快 1.67×。
BytePtr 注意到 back-pointer——值只有 {-1, 0, +1}——卻用 4-byte int 儲存。改成 signed char 讓 back-store 流量縮減 4×,在 4K(3840×2160)時 back-pointer array 從 32 MB 縮到 8 MB per seam pass。
Tiled 是終於讓另外 79 個閒置 SM 動起來的設計。做法:把 W 列分成 K=60 條 strip(每個 SM 一條)。每條 strip 兩側各有 T 個 halo 列。在 T 行的 tile 內,一個 block 完全在 shared memory 裡工作,只在 tile 邊界把 center strip 寫回 global memory。
正確性靠 seam-drift bound:在 T 行內,seam 最多偏移 T 列。任何誤差都在 halo 內。中心是 bit-exact。
結果:kernel 啟動次數從 H 降到 ⌈H/T⌉(8K、T=64 時是 68 次),60 個 SM 同時活躍。輸出與單 block 設計 bit-identical。
數字
在 8K(7680×4320),Tiled 達到 5.73 ms/seam——是我們所有 exact 設計中最快的。
| 方法 | ctrl | 1080p | 2K | 4K | 6K | 8K |
|---|---|---|---|---|---|---|
| CPU 單核 | 5.00 | 21.6 | 37.5 | 83.6 | 212 | 325 |
| CPU 最佳(32 執行緒) | 1.14 | 3.59 | 5.63 | 9.88 | 25.6 | 35.4 |
| Naive | 1.37 | 3.10 | 3.77 | 5.92 | 10.3 | 13.9 |
| Tiled(我們的) | 0.314 | 0.917 | 1.25 | 2.16 | 4.16 | 5.73 |
| 對比 CPU 最佳 | 3.6× | 3.9× | 4.5× | 4.6× | 6.2× | 6.2× |
比單核 CPU 快 57×。比調優過的 32 執行緒 NUMA-aware OpenMP 快 6.2×。最後這個數字是天花板——為什麼是天花板才是有趣的部分。
天花板是結構性的:三個理由
到這裡,合理的問題是:我們只是不夠努力嗎?我們花了相當多時間問自己同樣的問題。答案是否定的,而且可以用三種方式說明。
1. DP 的關鍵路徑是不可化簡的。
依賴圖的最長路徑長度是 H——每行一個節點。任何排程都至少需要 H 個串行的 min-step。GPU 可以在每行內部平行化(W 列),但無法減少 H 個串行步驟。行內最佳平行化就是 Tiled 已經做到的。
2. Transpose 幫不上忙。
直覺上的想法:把圖旋轉,換個方向跑 DP。但 transpose 是 storage 地址上的雙射——只是重新標記了儲存,依賴圖不變,關鍵路徑還是 H。如果 transpose 後再 carve,算的是水平 seam(深度 W 而非 H),那是正交任務,不是原任務的更快版本。我們用實驗確認:對寬圖來說,transposed 方向更慢,因為 W > H。
3. 把 DP 整個移掉也沒有提速。
這是最令人驚訝的結果。我們實作了 greedy non-cumulative selection——沒有 cost matrix、沒有串行依賴、完全平行。它在每個解析度都和 Tiled 差在 3% 以內。為什麼?因為每條 seam 的 pipeline,不是 DP,才是端到端的瓶頸。8K 下,5.73 ms 分成 ~4.3 ms DP 和 ~1.4 ms preprocessing。Preprocessing 的下界(energy 計算 + seam 移除)需要讀取每個像素的 energy、寫出輸出——在 8K 是 ~398 MB,對 V100 的 ~900 GB/s 頻寬來說,無論用哪種 selection 方法都要花 ~1.4 ms。Greedy 沒有 DP,但同樣要付這個頻寬下界的代價。它贏不了。
唯一有效的槓桿
有一個出口:改變問題本身。
Approximate batch removal 把一次 DP pass 攤銷到 K=60 條 seam。一次前向 pass 產生 60 條 strip-local seam 候選;單一 kernel 在一次 image-wide 讀寫中移除全部 60 條。每條 seam 的代價從 Θ(HW) 變成 Θ(HW/K)。
結果:8K 下 0.103 ms/seam——比 exact single-seam pipeline 快 56×。 代價是 strip-local 而非 global 最優:找到的 seam 是各自 strip 內的最佳,不保證是全域最小值。
這就是正式產品 pipeline 實際採用的 batch mode。Exact per-seam 的設法在工業上不是重要的情境;我們研究它是因為結構性限制在這裡最乾淨。
我們真正學到的
進去的時候,我們期望用新技巧超越前人的 GPU 實作。我們確實建出了我們找得到最強的 exact pipeline——Tiled 在每個解析度都比 Kim et al. 的 exact single-block DP 更快,Nsight 引導的 latency hiding 讓他們放棄的方案重新有競爭力。但比調優 CPU 快 6.2× 並不是他們近似方法達到的 76×。
更有價值的輸出是理解「為什麼」。DP 的關鍵路徑不可化簡。Transpose 沒幫助。移掉 DP 沒幫助。頻寬下界跟演算法無關。這些不是實作的失敗——這些是問題的性質。
有時候,最有用的結果是對可達前沿的嚴謹刻畫,加上解釋為何更多工程力氣也推不動它的不可能性論證。我們花在「證明天花板是真實的」的時間,比花在「撞上天花板」的時間還多。我認為這是讀這篇 paper 的正確方式。
唯一的大槓桿是攤銷。如果你願意用 strip-local 最優換 global 最優,batch mode 給你 56×。如果你需要 exact 結果,在 V100 上 6.2× 已接近可達的最大值——而這個值和頻寬下界之間的差距(~1.3×)告訴你所剩不多了。